机器人操作器
的有关信息介绍如下: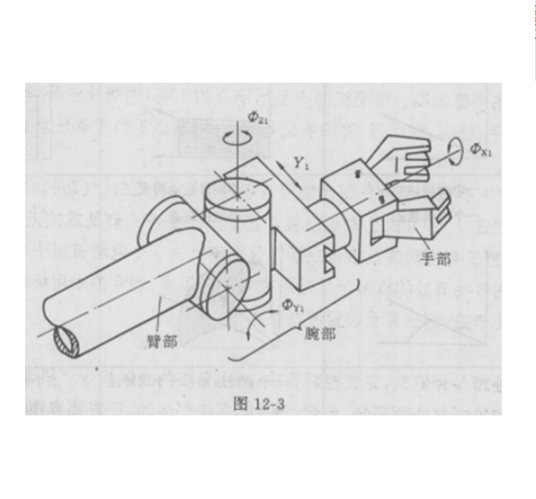
机器人操作器是机器人的执行系统,是机器人握持工件或工具、完成各种运动和操作任务的机械部分,一般由机身、臂部、腕部、手部4个部分组成,其结构可分为4类:直角坐标型操作器、圆柱坐标型操作器、球坐标型操作器、关节型操作器。关于自由度,机器人的自由度数目等于操作器中各部件自由度的总和。
想要了解更多“机器人操作器”的信息,请点击:机器人操作器百科
机器人操作器是机器人的执行系统,是机器人握持工件或工具、完成各种运动和操作任务的机械部分,一般由机身、臂部、腕部、手部4个部分组成,其结构可分为4类:直角坐标型操作器、圆柱坐标型操作器、球坐标型操作器、关节型操作器。关于自由度,机器人的自由度数目等于操作器中各部件自由度的总和。
想要了解更多“机器人操作器”的信息,请点击:机器人操作器百科